
项目背景
大庆油田化工有限公司甲醇分公司是一家国有企业,所在地区位于黑龙江大庆市,主营产品或服务为生产各种甲醇,甲醛,合成氨,醋酸等。本次项目主要任务是为工厂建立三维模型,实现区域各类信息的可视化,方便精细化的管理。
用户原本的计划是利用无人机影像提取出点云来建模,但最终模型并没有达到预期的效果,存储罐、管道、厂房内部等设施是问题所在,通过无人机提取的点云无法表现出这些细节。因此我们推出方案,利用TX8进行地面测站扫描,将空、地点云融合,建立完整的目标模型。
 图1 作业区域示意图
图1 作业区域示意图TX8技术优势

| 速度快: | 普通外业数据采集3分钟便可完成一站数据采集。 |
| 精度高: | 120米范围内,可达1mm精度。 |
| 距离远: | 对于宽广的区域,TX8扫描范围可达340米扫描测程。 |
| 自动化: | 可以实现软件自动配准处理。 |
| 高兼容: | 所应用的不但可以识别多种数据格式,同时还可导出Dwg、Dxf等数据格式,能够在CAD或其他软件中加载并处理。 |
| 无标靶作业: | 本方案打破了传统的扫描仪作业过程使用标靶的局限,使作业更简单。 |
软件简介

Trimble Realworks是专为当今各种扫描专业应用来设计的、功能强大的办公软件,可从各种三维激光扫描仪导入丰富的数据并将其转换为引人注目的三维成果。
- 配准、可视化、浏览、管理扫描仪点云数据
- 管理、处理和分析大数据集
- 无标靶自动配准,生成报告
- 集成来自Trimble GNSS、全站仪和3D数据
- 导出CAD设计包
- 发布项目数据包供单独浏览、测量、注解
- 5个版本适应不同应用场景
解决方案
外业流程
扫描站的布测采用地毯阵列式扫描站架设原理,首先对工厂外部整体架设若干站,扫描工厂的内部所有区域数据,这样就能扫描出工厂的内部整体,对于一些复杂的设施区域,我们采用集中式扫描作业方式,对于内部或者上层空间,采用多角度多层次的扫描作业,确保数据采集齐全。为了确保扫描站之间的数据能够配准,设立标靶进行扫描。
 图2 TX8外业扫描
图2 TX8外业扫描内业流程
将外业所测数据导入RealWorks中,首先对原始数据的齐全性、完整性和可用性进行检查,并确保每一测站之间存在公共点可以进行配准。其次建立测站点云、全自动配准、配准精度检测、目视检测配准效果,并对一些不必要的噪点进行分割删除,以及对于特别密集的点云数据进行重新取样,以减少作业过程中繁重的处理过程。
通过特征点,将无人机影像提取的点云与扫描点云进行配准。
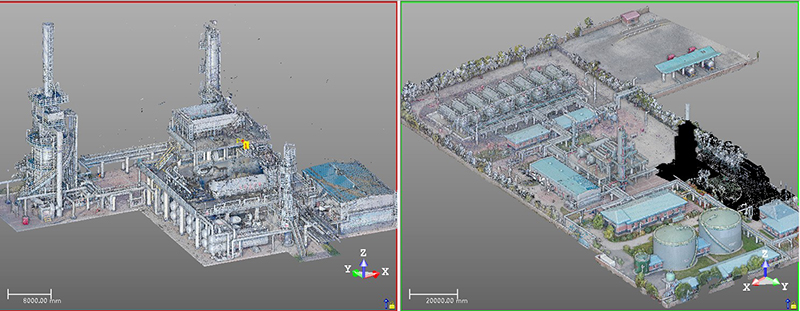 图3 空、地点云融合
图3 空、地点云融合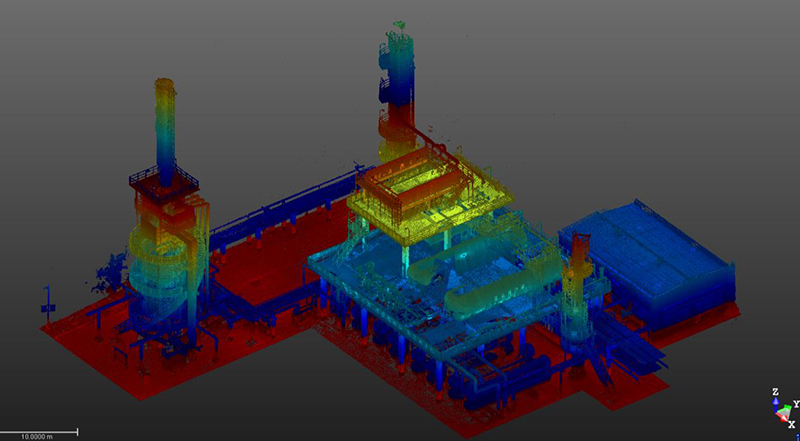 图4 厂房细节展示
图4 厂房细节展示经过Realworks数据转换,导入3D Max建模软件,利用融合之后完整表达各方面细节的点云数据建立模型。
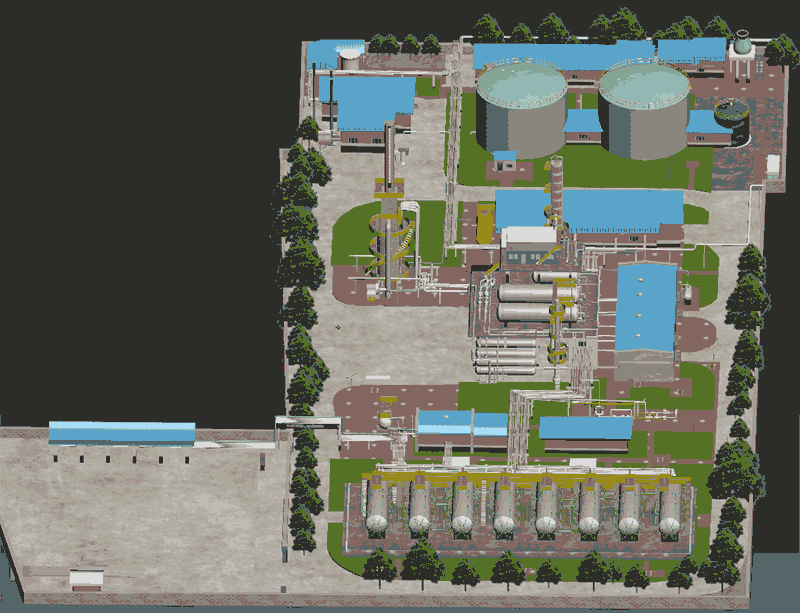 图5 模型展示
图5 模型展示优势总结
采用空、地点云融合处理的方案,有效解决用户从整体到局部各方面的建模需求,将工厂信息多角度表达出来。
RealWorks快速准确的实现各测站点云数据的全自动拼接,并且在确保不丢失精度的情况下实现点云数据的分割去噪和取样抽稀,以及实现二三维数据的空间检测和拟合功能。
利用TX8对物体进行扫描时,可以设定采样间距,不同的被测物体,不同的测量仪器会有所不同,其中可以设定的采样间距最小可达亚毫米级(0.1mm),这样的采样密度可以完整的保留目标的特征信息,不留死角。
点云的融合处理程度结合各自优势,实现360°建模。