
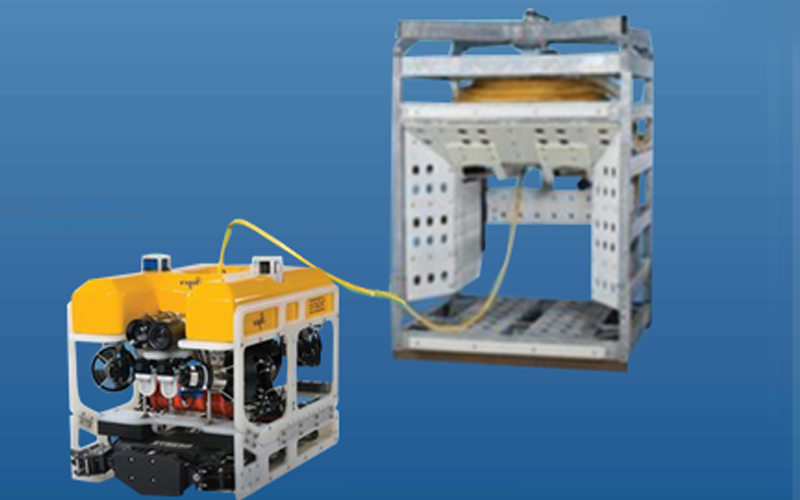
Seaeye Tiger与Lynx型ROV为目前应用于油气行业中较多的观察与检测型水下机器人,其两款型号工作水深分别为1000米和1500米,均可适用于各种复杂海况项目现场。另外系统采用开放式的结构设计,配套脐带缆布放和整理装置,可集成扩展多种功能传感器,具有便捷的深水操控性与功能性,满足军队、石油、天然气、科研等各种项目应用需要。
咨询
关键特性技术参数
- ROV主机采用聚丙烯ROV框架,具有坚固、浮力大、易钻孔和耐腐蚀的优点
- 平衡性设计,合理的浮体材料和压载的配比,保证系统在水下具备良好的稳定性
- 标准双绞脐带缆通讯方式,光纤通讯模块升级可选
- 经久耐用的安装固定方式,确保固定在主机上的摄像头、声纳等传感器的安全
- 开放式平台,扩展选项宽泛,兼容各种水下检测传感器,提高系统的应用能力
- 采用主板功能模块化设计,便于故障排查和故障模块更换,降低成本、提高效率
- 系统可通过扩展大功率多功能机械手、USBL水下声定位系统、图像扫描声纳、图像识别声纳、CP、清洗刷等相关部件,实现在各种不同环境下的具体应用


| Tiger | Lynx | |
| 系统工作水深: | 1000m | 1500m |
| 推进器配置: | 5个直流推进器(4个水平矢量方向,1个垂直方向) | 6个直流推进器(4个水平矢量方向,2个垂直方向) |
| 前进推进力: | 62kgf;侧向推进力:43kgf;垂直推进力:22kgf | 66kgf;侧向推进力:47kgf;垂直推进力:43kgf |
| 系统载重: | 32kg | 34kg |
| 水面运行速度: | 4knots;最大水下运行速度:3knots | |
| 数据控制通道: | 3/4个视频通道,2个灯光控制通道 | |
| 其他特点: | 180度旋转云台,配套多组广角、彩色、低照度、高清晰摄像头和高亮度LED照明灯 | |
| 内置航向(罗经)、姿态、深度等传感器 | ||
| 深度自动测量、航向姿态自动测定、推进器航速锁定功能等自动控制功能 | ||
| 推进器增益控制,推进器速度锁定,自动锁定深度,自动航向姿态锁定,相机云台,相机焦距,相机切换,照明灯开关,灯光强度,相关附件,视频覆盖位置,电源开关控制,程序键盘控制等手动控制功能 | ||
| 推进器增益(功率)设定参数,照明等级设定,推进器速度锁定设置,深度,航向姿态,系统运行小时计数,摄像头角度,水温,时间,日期和用户注释文本信息等系统参数显示 | ||